
产品中心
多通道协调加载控制系统
1) FTS 控制系统总体结构
FTS控制系统采用三级分布式控制结构,分别是试验管理级、协调修正级和实时控制级。系统的总体结构如下图所示:
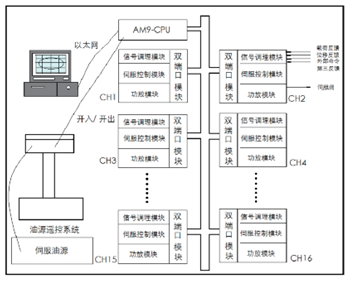
FTS控制系统总体结构
试验管理级:试验管理级通过人机交互,实现对试验的操纵与管理。
协调修正级:采用了嵌入式控制系统模块。该模块可靠性高、体积小、功耗低、工作温度范围宽,组态灵活方便。在本级中,运行着一套功能强大的协调控制软件。
实时控制级:实时控制级主要包括反馈调节器模块、通道机和伺服控制器模块及阀驱动模块等,采用先进的DSP数字处理技术,实现伺服闭环控制的数字化。
2) FTS控制系统功能
- 位移控制、力控制、参量控制、外部控制
- 同相同步加载和反相同步加载
- 波形发生、贮存、输出
- 波形包括:正弦波、三角波、拍波、梯形波、斜波、随机波、地震波
- 频率范围:0.001~100Hz(频率分辨率0.001Hz)
- 试验类型:低周反复试验、伪静力试验、拟动力试验、静力试验、疲劳试验等
- 单通道或多通道闭环刷新速度:10000次/秒(不受通道数的限制)
- 相位测量精度:0.01°
- 相位控制精度:优于2°
- 对于振动台系统另外配置迭代软件
- 系统提供用户二次开发接口程序
- 控制系统具有外部检测接口(可将载荷及位移信号外部输出至数采系统,以便同步采集)
- 桥压数字调节
- 程控自动调零
- 系统配有便于人工干预的现场控制盒,其中包括:报警、超载指示、急停卸载
- 配有多通道协调控制软件
- 断线保护、极限保护、误差保护
- 阀驱动颤振信号幅度可调
- 载荷误差超差保护、载荷超限保护
- 位移误差超差保护、位移超限保护
- 系统具备掉电保护功能及反馈信号断线保护功能
 |
 |
 |
| 6通道伺服控制箱 | 16通道协调加载控制柜 | 72通道协调加载控制柜 |
 |
 |
| FTS伺服控制模板 | FTS嵌入式电源模块 |
3) 系统应用软件
系统应用软件主要完成系统及试验的定义、管理、监控和试验数据的处理等工作,提供易操作的人机界面,软件可在各版本中文Windows系统操作平台下运行。
软件功能:
设定系统控制参数
设定传感器的零位及增益进行传感器的标定
传感器的非线性补偿
系统安全保护软件
静力试验谱、疲劳试验谱、载荷谱设定软件
波形类型:正弦波、三角波、梯形波、方波、直流、载荷谱、随机波
系统控制方式:力控或位控,且两种控制方式可以平滑转换
试件安装:用于试验前试件位置的调整
系统诊断:可以在试验开始前检测系统的各类硬件故障
通道分配:可随意设定试验所占用的通道
试验谱定义:即设定试验的加载方式(载荷或位移),加载的各种波形、频率、相位、终值及重复次数等试验参数。试验谱的定义非常灵活,几乎可以模拟出任意形状的曲线。
试验参数的设置:设置试验的控制方式及相关参数、超差的响应方式、卸载时间、试验的开始点等。
试验选择:将所设定的试验挂接在试验站上,可以只挂接一个试验,也可以挂接多个试验,且每个试验可以同时
控制多个通道,多个试验可以同时运行,也可以分别运行。
曲线显示:曲线类型、范围、时间长度可选;同一曲线显示框中可同时显示多条曲线,并可同时打开曲线显示框。
试验报告:用户可以随时打开或关闭数据报告、运行状态报告、试验开始点报告、卸载报告等,而超差报告、超限报告、故障报告则会自动的弹出,所有的报告均可脱机打印。
数据存储:试验的数据可以根据用户的需要随时保存,且可以用其他的标准软件进行数据处理及分析。
在试验的过程中,用户可以随时干预试验,如调整PID参数、阀控参数、保持、加速、增幅、减幅、卸载等,以保证试验的精确性。
控制方法:静踏步法、动踏步法、相位修正法、幅值修正法、幅相修正法(这些方法是多通道控制系统所必须的)
多通道协调加载系统特点:
对于建筑结构、铁路、航空、航天、飞机等大型复杂结构系统的疲劳与静力试验,国际上通用的方法是多通道协调加载。 而协调加载要解决的问题之一, 就是将分布于结构试件的多通道作动器输出力或位移进行同步或异步的协调控制
在结构试件加载过程中,各加载通道的幅值协调、相位的准确同步以及频率的完全一致是多通道协调加载系统的特点之一,而常规的伺服控制系统以及由分立通道组成的控制系统很难做到这一点。
在加载过程中,尤其是静力加载的过程,不仅要求同时到达最大试验载荷值,而且要求在加载过程中也要保持一定的同步性。为了解决这个问题,北京富力通达科技有限公司专门为静力试验开发了一套完善的试验控制软件。实时检测各通道加载速度,并对加载速度进行调整,使各通道同步加载。多通道之间的频率同步是一个关键问题,如果通道之间频率不一致时,就会产生相位漂移甚至反相,使整个试验失败。而FTS协调控制系统从结构设计上,使各通道选用同一时钟控制,完全可以避免以上问题。
对于静力试验,系统可以通过模糊控制原理使控制系统达到最佳效果。
对于疲劳试验,系统可以自动识别系统的传递函数,通过幅值及幅相修正法来进一步提高系统精度。
关于相位控制问题,由于每路伺服控制系统的系统传递函数不一致性,在加载过程中,每一通道反馈信号和指令信号的绝对相位也不一样,这样在加载过程中,各通道之间便存在相对相位差,使加载过程不同步。因此FTS软件设置了相位检测模块。通过对各通道基波检测,并做相关运算,可精确的测出各通道之间的相位差。FTS软件中的相位修正模块,通过对系统指令相位的修正,使反馈相位达到指令相位要求。在试验过程中相位精度小于2°(频率15Hz以下)。经过二十余年的工作实践,用于多通道协调控制的FTS相位修正法、幅值修正法、动静踏步修正法软件已日趋完善,较好的针对性的解决了目前国内各领域结构试验的关键问题。
4) 协调加载控制方法
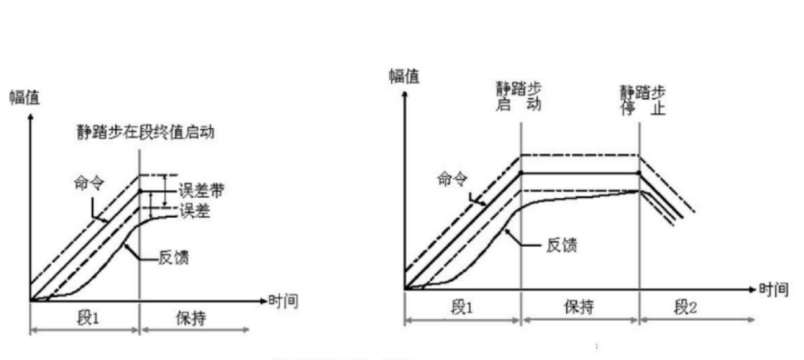
静踏步等待法:
静踏步修正法是指加载命令在加至终值处时,停止加载,即静踏步等待。如果在规定的最大等待时间内所有通道反馈值与命令的误差进入设定的误差带,则继续下一终值点的加载;反之,如果在规定的最大等待时间内有通道反馈值与命令值的误差不能进入设定的误差限,则视为超差。超差处理根据试验要求由试验人员预先设定,在系统检测为超差时,自动进行超差处理。
动踏步修正法:
动踏步修正法是指在设定频率下从某一终值向另一终值加载的过程中检测命令与反馈的误差,在误差超过给定误差带时,通过不断降低加载的频率,最终使反馈与命令的误差达到给定要求的过程。
幅值修正法:
幅值修正法是指在周期性重复加载过程中使用的辅助控制方法。通过检测反馈幅值与给定命令的误差,对加载命令的幅值进行修正,而改变反馈值,最终使反馈幅值与给定加载幅值的误差在给定的误差限内。
相位修正:
相位修正是指在周期性重复加载过程中使用的辅助控制方法。通过检测各通道反馈间的相位与命令相位的误差,对加载命令进行相位修正(即改变当前加载命令的相位),最终使反馈值之间的相位与给定加载相位的误差在给定的误差限内。
 |
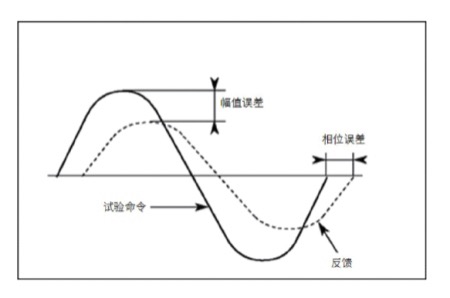 |
| 静踏步等待法幅 | 幅值修正法 |
5) 管理级PC机软件界面(TEST)
TEST软件主要用于完成系统及试验的定义、管理、监控和试验数据的处理等工作,提供易操作的人机界面而不参与实时控制,故采用了中文的Windows操作平台。
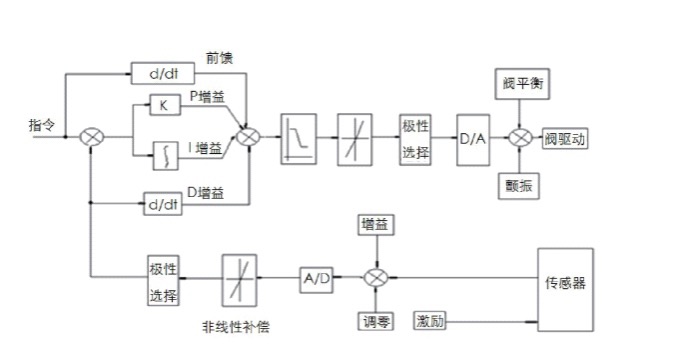 |
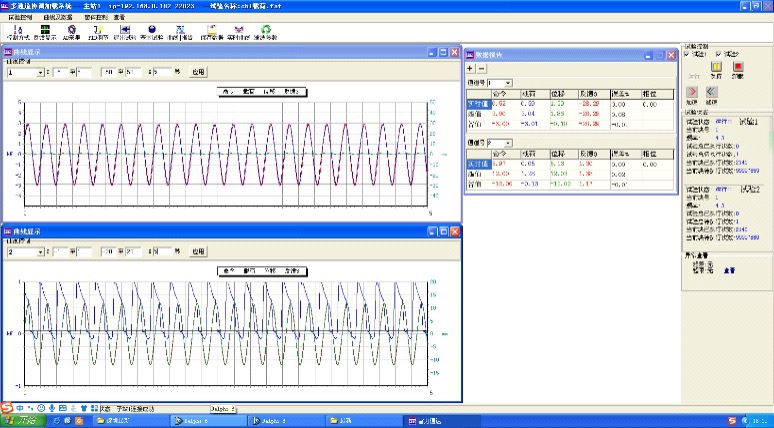 |
| 伺服控制系统原理图 | 疲劳试验波形显示页面 |
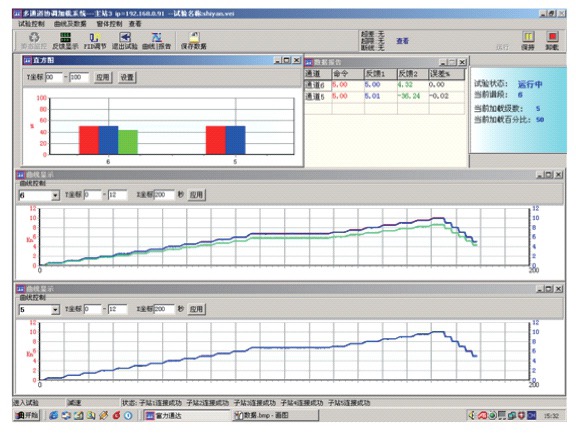 |
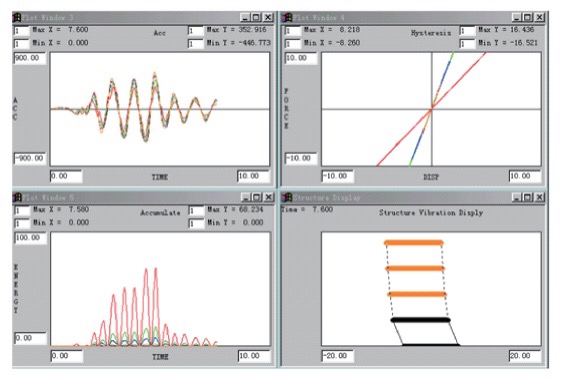 |
| 静力试验波形显示页面 | 拟动力试验波形显示页面 |
联系地址
北京富力通达科技有限公司北京市朝阳区望京街10号望京SOHO塔三100102
松原富力通达科技有限公司吉林省松原市经济技术开发区新研大路365138000
 24小时服务热线
24小时服务热线 FTS公众号
FTS公众号